
For those interested, here is a technical overview of the structure and function of a FMCW Radio Altimeter.
Frequency working range of a FMCW Radio Altimeter
A radio altimeter operates in a high-frequency frequency range of several Gigahertz (GHz), on this page two frequency ranges are offered (4.3 GHz Aircraft Radio Altimeter and 24 GHz Universal Radio Altimeter).
As an example:
1 GHz corresponds to 1e9 Hz = 1 000 000 000 Hz, i.e. one billion oscillations per second.
For comparison:
The radio-UKW range is in a frequency range of approx. 100 MHz, satellite television at approx. 12 GHz.
This high-frequency signal is emitted into the room via an antenna as an electromagnetic wave.
Frequency-Time-Plot for FMCW
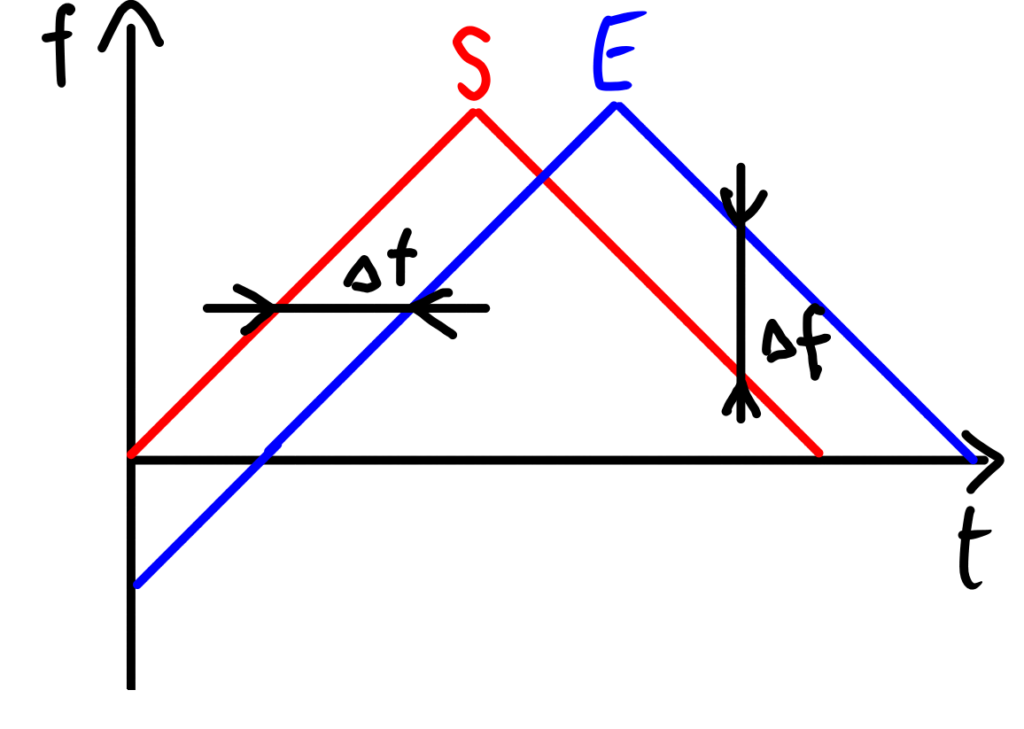
Figure 1 shows the basic principle of the FMCW Radio Altimeter. FMCW stands for „frequency modulated continuous wave radar“. It illustrates a linear change in frequency over time (frequency modulation) in the form of a triangular signal. The red signal represents the transmit signal („S“), the blue signal the receive signal („E“). Δt is the time offset between transmit and receive signal due to the signal propagation time, Δf is the resulting difference frequency between the two signals at a given time.
Signals in Time Domain for FMCW
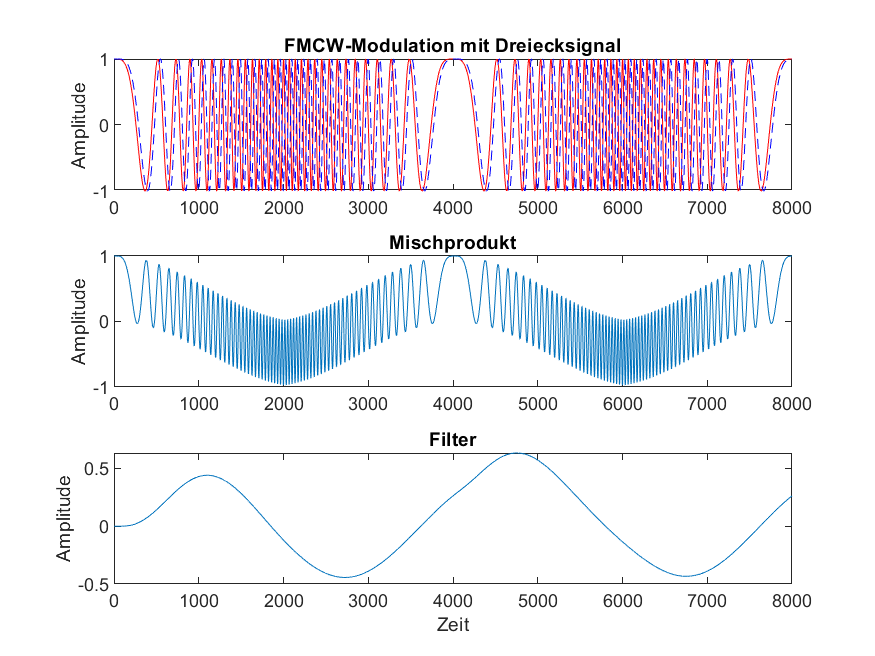
Figure 2 shows three plots in the time domain. The top plot represents the triangular modulated signal of the transmitter (RED), the received signal is delayed by the distance covered or the corresponding time (BLUE dashed). The two signals are mixed (in simplified terms multiplied) and the result is a mixed product (middle plot), i.e. the sum and difference frequencies between the transmitted and received signal.
The mixed signal is then electronically filtered, in particular the high-frequency sum signal is removed, leaving the difference frequency (filtered mixed signal, bottom plot).
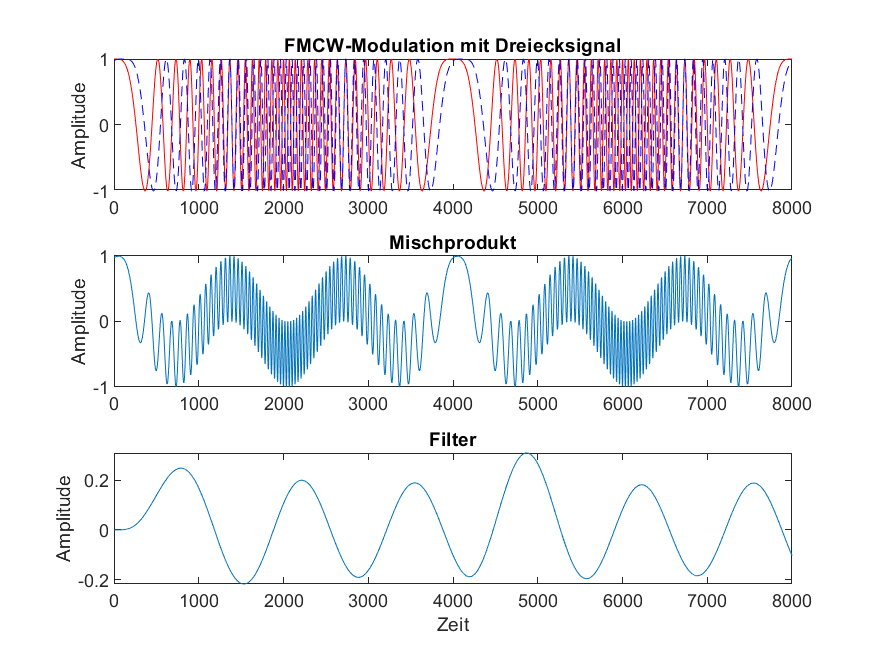
This difference frequency forms a measure for the distance or height. In contrast to Figure 2, Figure 3 gives another example where the flying object flies slightly higher – the difference frequency increases!
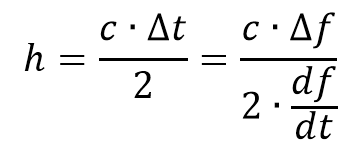
Mathematically, altitude can be described simply as the speed of light multiplied by half the time difference (halving due to the fact that the signal to the ground travels one distance and the reflected signal travels back a further distance, i.e. twice the total distance).
df/dt describes the differential frequency change over time. Since it is a linear frequency change (at least theoretically, see Figure 1), this corresponds to the slope of the triangular signal in the frequency-time diagram.
Thus all parameters are known on the right side of the equation except for the difference frequency Δf to be measured .
Signal processing FMCW Radio Altimeter
After that, the signal is electronically filtered and amplified in order to be digitized by means of an analog-to-digital converter and further processed by a microcontroller (a mini computer with CPU, memory and periphery as integrated circuit).
Subsequently, methods of digital signal processing are applied, in particular the signal is analyzed in the frequency domain. At the end, the implemented algorithm outputs the height, which is made available via an interface (ARINC 429, RS485, RS232) digital or analog.
Doppler frequency at radial speed
If the flying object climbs or descends, the frequency also changes by the amount of the Doppler frequency. In addition to height measurement, the rate of climb or descent can be determined by combination of ascending and descending frequency ramps of the triangle signal.
Practically, for the function of a FMCW Radio Altimeter, some more factors have to be considered, which are not listed here because they would go into too much technical detail.